MASSACHUSETTS – A team from the MIT Computer Science and Artificial Intelligence Laboratory discovered a new way to use 3D printers. They tricked a commercial model – The Stratasys Objet260 Connex – into accepting a liquid polymer into the printing process.
3D printers are very famous for bringing computer designs to the physical world, but there are a lot of limitations to what you can reproduce with them. They use materials that solidify after being exposed to high concentrations of UV light. In other words, they take malleable substances, mold them and then harden them with heat. The process is perfect to build little pieces with high accuracy that are otherwise impossible or very difficult to make.
A group of scientists took a Stratasys 3D printer and did some modifications for it to work with different materials. They realized this model uses a cleaning fluid that does not harden after it is exposed to light. If there was a way to use this substance into the printing process, the machine could print solid and liquid materials.
After some research, they found out that the cartridges had a Radio-Frequency Identification (RFID) chip which did not let the device use a different material when printing. The solution was actually very simple, they replaced it with another model’s RDIF chip, the one found in the TangoBlack+. With some changes in the settings, the printer accepted both the cleaning liquid and the standard polymers to print. The result? Printable Hydraulics.
Making robots is difficult
To further prove the uses this technique has in robotics, the team designed 3 different models; a linear pump, grippers, and a robot, that are powered by liquid and more importantly, do not need assembling. Which means, a person without technical knowledge can use a modified 3D printer to make a functional pump or a robot.
Usually to make a robot, a person has to go through very technical training and spend lots of time creating little perfect pieces and putting them together. It is not a bad process, but it’s expensive and complicated. Assembling the pieces greatly limits what engineers can do. But with this new method, the cost goes down and the effort is trivial, the printer does all the heavy lifting.
MIT develops first-ever 3D-printed robots made of both solids & liquids. https://t.co/ssnVnkzwGZ pic.twitter.com/qUMt254Wgm
— MIT CSAIL (@MIT_CSAIL) April 6, 2016
Can robots make other robots?
Well, not yet. The process is very difficult and so far, scientists have not figured out a way to “teach it” to machines. The MIT team really came through in this regard. They combined the bellows designs, the hydraulic pumps with hard parts to create a droid, a functioning droid.
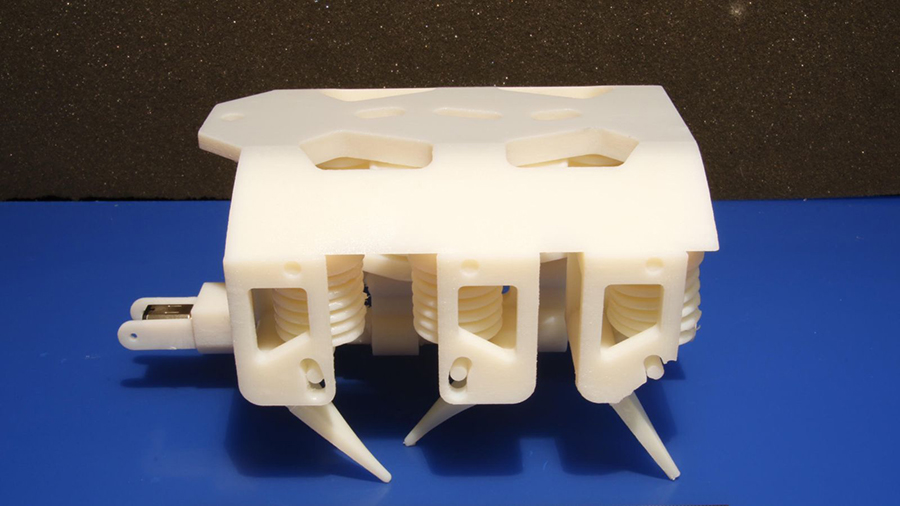
The Hexapod robot weights 690 g, is 14 cm long, 9 cm wide and 7 cm tall and yes, it has 6 legs. They are connected to bellows that are moved by liquid that is inside the droid. The machine is a little inclined towards the front, 3 of the legs are oriented the same way and the other three are oriented to its tail. A little battery activates the internal pumps and it actually moves at 0.125 body-lengths per second. It’s not going to break any speed record, but it’s still very impressive.
If you add the soft grippers, also build with a 3D printer, you can say they proved their point. The best part is there is no assembling, which means no bubble extraction afterwards, no manually connecting little legs to bellows or putting pumps inside a robot before sealing it.
Perfect for disposable devices
With the current printing materials, there is a considerable loss of mechanical strength and durability, but since it simplifies a very complicated process, some industries may benefit from this process.
The researching team was formed by MacCurdy, R.; Katzschmann, R.; Kim, Y. and Rus, D, and the paper will be presented at the 2016 IEEE International Conference on Robotics and Automation in Stockholm in May.
http://groups.csail.mit.edu/drl/wiki/images/7/7c/2016_MacCurdy-Printable_Hydraulics-A_methods_for_fabricating.pdf